#惯性导航# 2. 惯性导航技术
#惯性导航# 2. 惯性导航技术

2. 惯性导航技术
惯性传感器
陀螺仪(gyroscope)和加速度计(accelerometer)是惯性导航系统的两大关键
传感器,其性能是影响惯性系统精度和稳定性的主要因素
惯性导航技术发展
新型惯性传感器
第一代陀螺仪:机械转子陀螺仪
机械转子陀螺仪是以经典力学为基础,具有高速转动的转子或振动的部件
第二代陀螺仪:光学陀螺仪
光学陀螺仪是采用萨格奈克(Sagnac)干涉原理,利用光纤绕成环形光路,并检测出随转动而产生的沿相反方向旋转的两路激光束之间的相位差,从而计算出旋转角速度。
光学陀螺有两种:一种是激光陀螺,另一种是光纤陀螺。与激光陀螺相比,光纤陀螺结构更简单、造价更低,且易于微型化和固态化。
第三代陀螺仪:微机械(MEMS)陀螺仪
MEMS陀螺仪是基于哥氏效应工作的。由于哥氏力的大小与振动速度、输入角速度乘积成正比,检测出哥氏力的大小和方向就可以检测出输入角速度的大小和方向
MEMS陀螺仪是集微型精密机械、微电子学、半导体集成电路工艺等新技术于一身的世界前沿性新技术(虽然但是,用的还是经典力学)
第四代陀螺仪:原子陀螺仪
原子陀螺仪是它以碱金属原子、电子和惰性气体原子为工作介质,具有小体积和超高精度/灵敏度等特点
原子陀螺仪
- 干涉式
- 原子干涉陀螺仪
- 自旋式
- 核磁共振陀螺仪
- 无自旋交换弛豫陀螺仪
- 干涉式
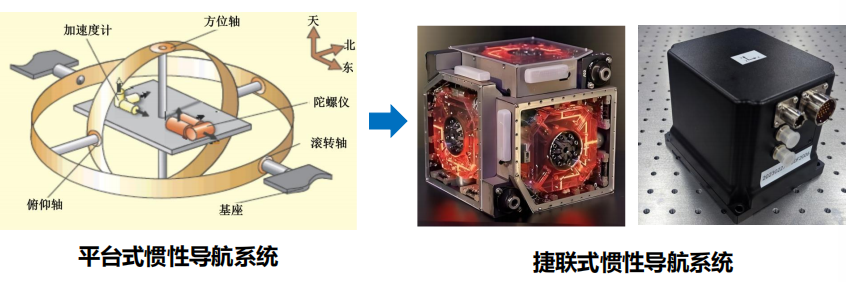
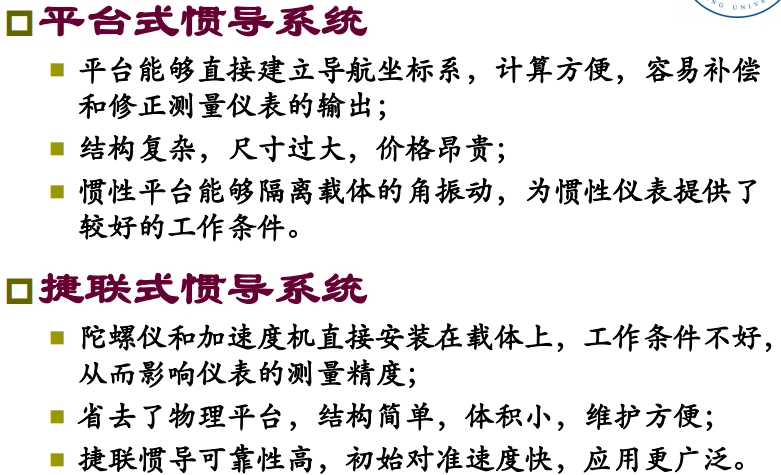
新型惯性导航系统
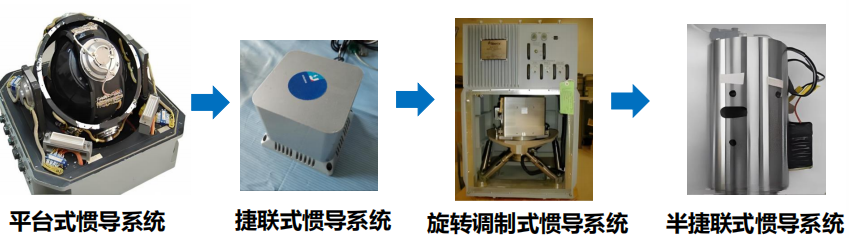
捷联式惯导系统以其体积小、重量轻及成本低等方面的优势已逐渐取代平台式惯导系统,成为惯性导航系统发展的主流
This post is licensed under CC BY 4.0 by the author.