#惯性导航# 3. 坐标系漫谈
#惯性导航# 3. 坐标系漫谈

3. 坐标系漫谈
1. 惯性参考坐标系
宇宙空间保持静止或匀速直线运动为参照物构成的参照坐标系,就称为惯性参照系
(由于万有引力等因素,真实的惯性系是不存在的)
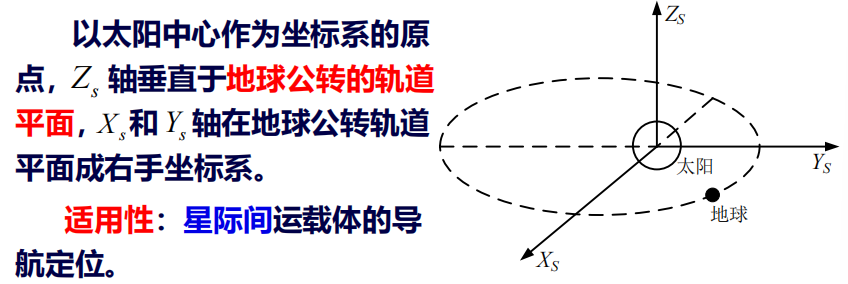
太阳中心惯性坐标系
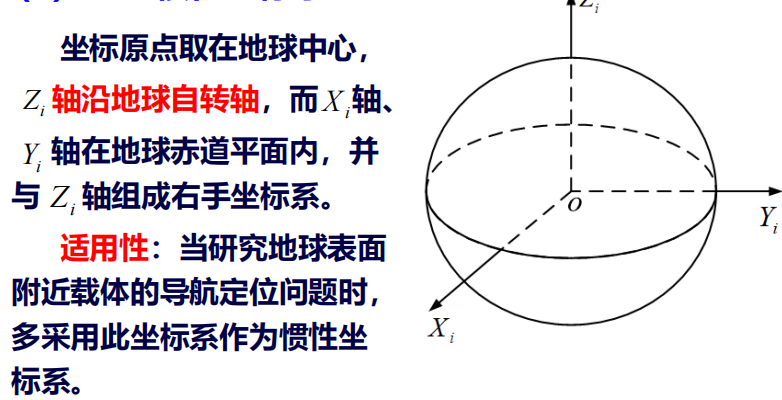
地心惯性坐标系
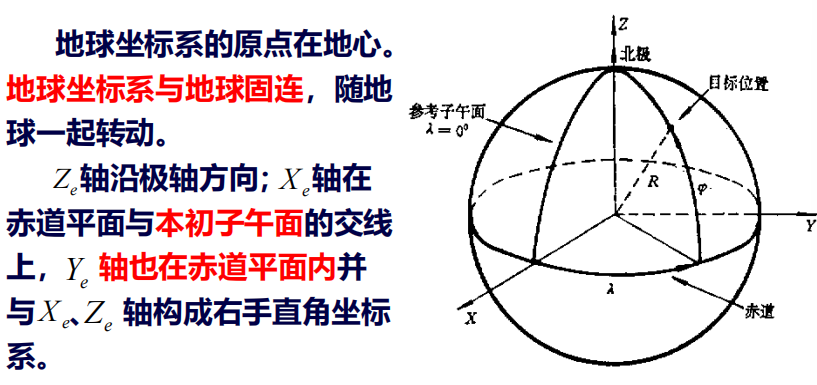
2. 地球坐标系
随地球一起转动$\rightarrow$ 非惯性系
地球相对于恒星(惯性空间)自转角速度,要大于地球相对太阳的自转角速度
(原因在与相对太阳坐标系分析地球自转角速度$\omega$时,需要再减去地球公转旋转角速度$\omega^{\prime}$)
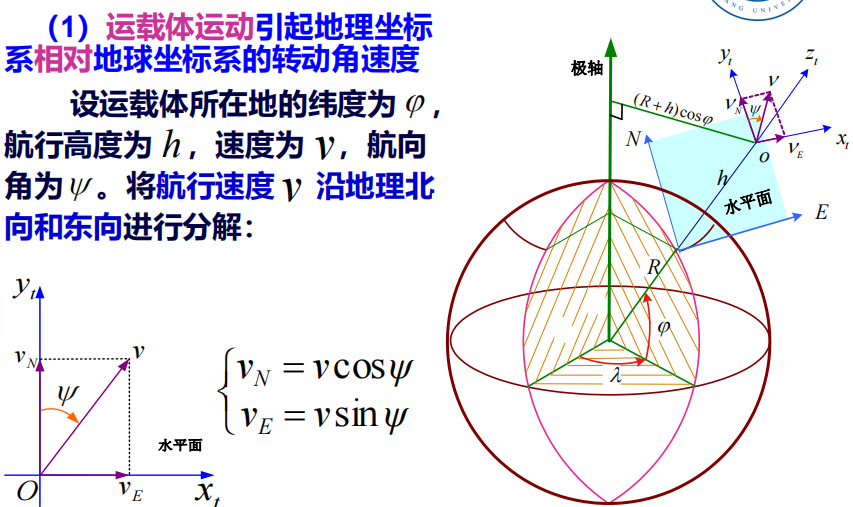
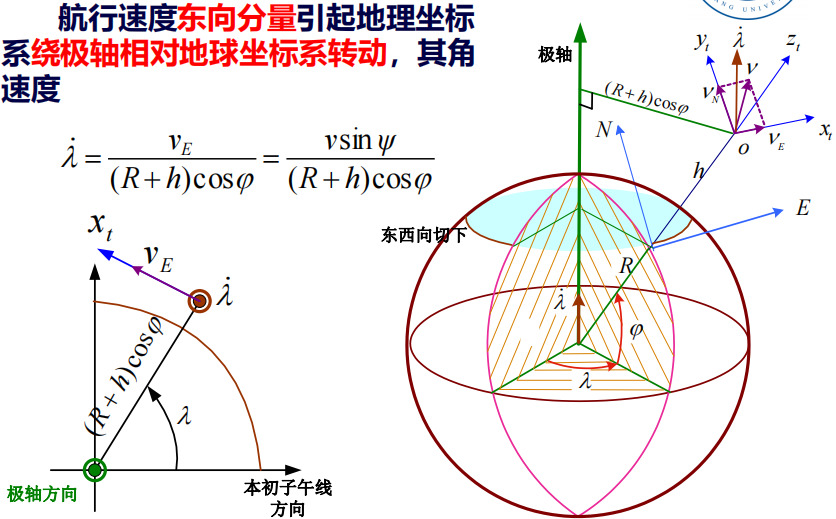
3. 地理坐标系

\[\omega_{地理\rightarrow 惯性}=\omega_{地理\rightarrow地球}+\omega_{地球\rightarrow 惯性}\]运载体相对地球的运动将相当于地理坐标系相对地球坐标系运动(转动)
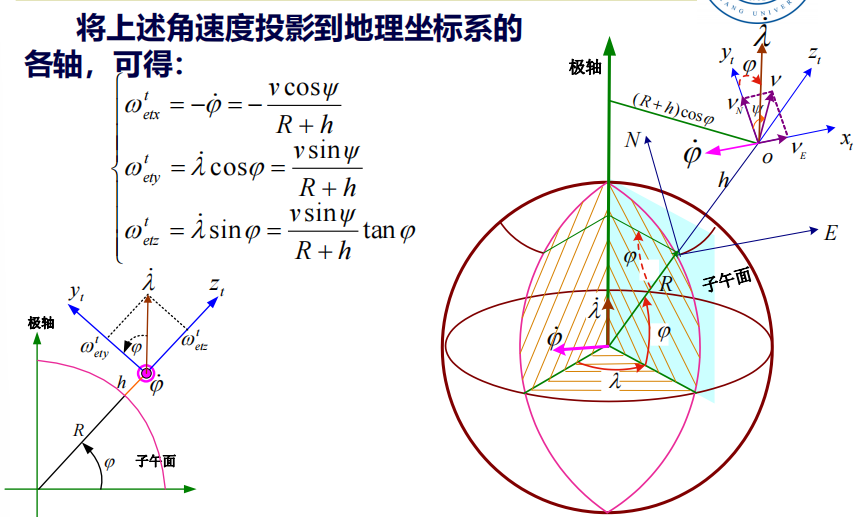
地理坐标系相对地球坐标系

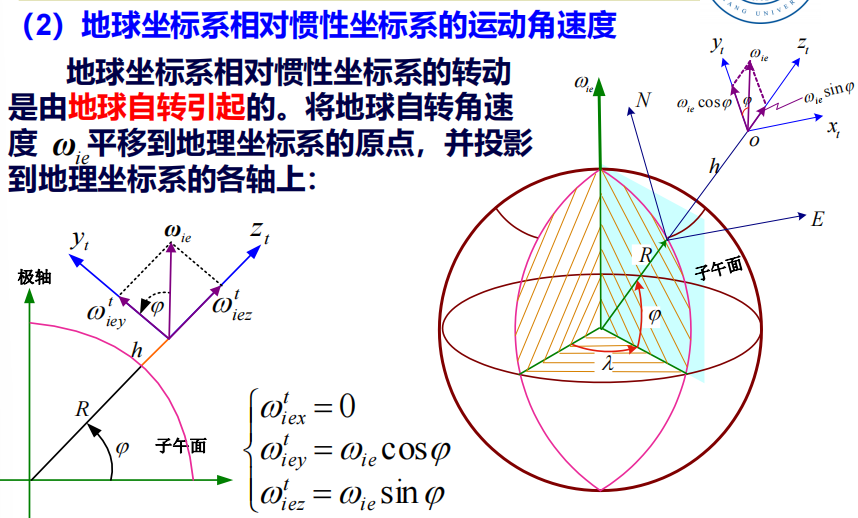
地球坐标系相对惯性坐标系
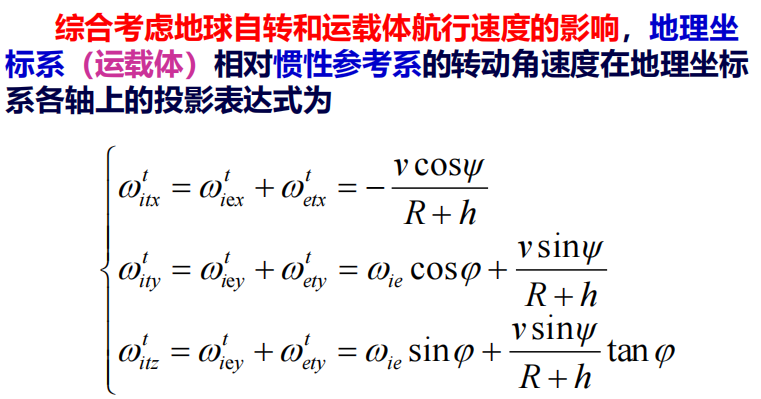
最终地理坐标系相对惯性坐标系
4. 载体坐标系
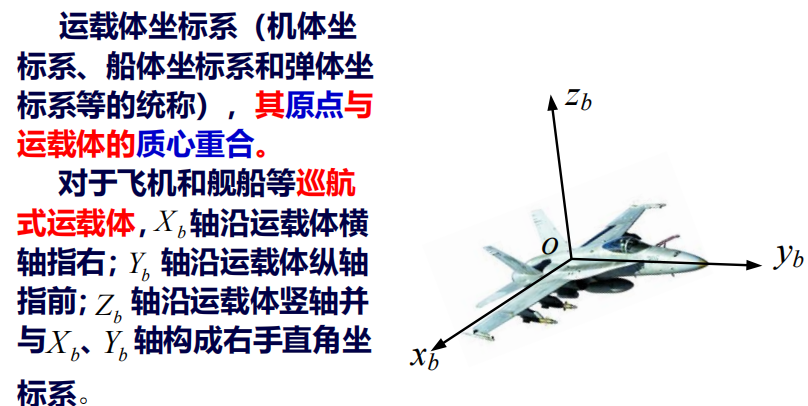
要点:机头对 $y$
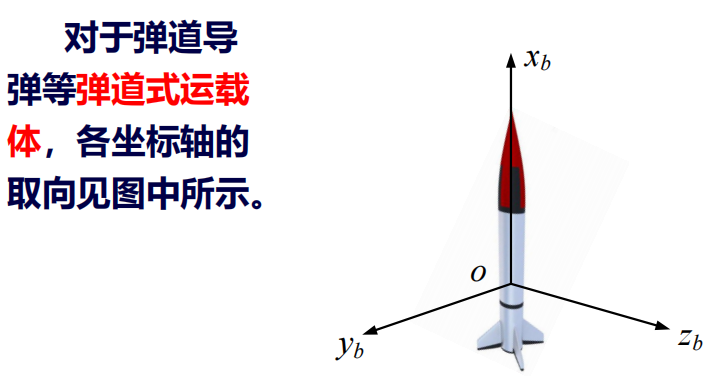
要点:弹头对 $x$
运载体的俯仰角、横滚角和航向角统称为姿态角。姿态角是更具运载体坐标系相对地理坐标系的转角决定的 。

航向角 $\psi$
地理坐标系 $y_t$ 与载体坐标系横滚轴 $y_b$ 在水平面的投影 $y_h$ 的夹角,偏东为正
俯仰角$\theta$
$y_b$ 与 $y_h$ 的夹角,抬头为正(高于水平面)
横滚角 $\gamma $
$x_b$ 与其在水平面投影 $x_h$ 的夹角,右倾为正,左倾为负
5. 描述刚体角位置的方法
方向余弦法
方向余弦
\[R_x=\cos <\vec{R},\vec{i}>\\ R_y=\cos <\vec{R},\vec{j}>\\ R_z=\cos<\vec{R},\vec{k}>\]
两个坐标系之间的方向余弦
\[\left[ \begin{array}{c} R_{x}^{0}\\ R_{y}^{0}\\ R_{z}^{0}\\ \end{array} \right] =\left[ \begin{matrix} \cos \left( \boldsymbol{i}_{_r},\boldsymbol{i}_{_0} \right)& \cos \left( \boldsymbol{j}_{_r},\boldsymbol{i}_{_0} \right)& \cos \left( \boldsymbol{k}_{_r},\boldsymbol{i}_{_0} \right)\\ \cos \left( \boldsymbol{i}_{_r},\boldsymbol{j}_{_0} \right)& \cos \left( \boldsymbol{j}_{_r},\boldsymbol{j}_{_0} \right)& \cos \left( \boldsymbol{k}_{_r},\boldsymbol{j}_{_0} \right)\\ \cos \left( \boldsymbol{i}_{_r},\boldsymbol{k}_{_0} \right)& \cos \left( \boldsymbol{j}_{_r},\boldsymbol{k}_{_0} \right)& \cos \left( \boldsymbol{k}_{_r},\boldsymbol{k}_{_0} \right)\\ \end{matrix} \right] \left[ \begin{array}{c} R_{x}^{r}\\ R_{y}^{r}\\ R_{z}^{r}\\ \end{array} \right]\] \[\left[ \begin{array}{c} R_{x}^{r}\\ R_{y}^{r}\\ R_{z}^{r}\\ \end{array} \right] =\left[ \begin{matrix} \cos\mathrm{(}\boldsymbol{i}_r,\boldsymbol{i}_0)& \cos\mathrm{(}\boldsymbol{i}_r,\boldsymbol{j}_0)& \cos\mathrm{(}\boldsymbol{i}_r,\boldsymbol{k}_0)\\ \cos\mathrm{(}\boldsymbol{j}_r,\boldsymbol{i}_0)& \cos\mathrm{(}\boldsymbol{j}_r,\boldsymbol{j}_0)& \cos\mathrm{(}\boldsymbol{j}_r,\boldsymbol{k}_0)\\ \cos\mathrm{(}\boldsymbol{k}_r,\boldsymbol{i}_0)& \cos\mathrm{(}\boldsymbol{k}_r,\boldsymbol{j}_0)& \cos\mathrm{(}\boldsymbol{k}_r,\boldsymbol{k}_0)\\ \end{matrix} \right] \left[ \begin{array}{c} R_{x}^{0}\\ R_{y}^{0}\\ R_{z}^{0}\\ \end{array} \right]\]- 上述九个方向余弦可以组成方向余弦矩阵
- 对于刚体坐标系的一个角位置,就有唯一的一组方向余弦与其对应
- 方向余弦矩阵可以确定定点转动刚体在空间的角位置,其中 $C_{r}^{0}$ 是第一个, $r \rightarrow 0$ 称为 $r$ 对 0 系的方向余弦矩阵,$C_{0}^{r}$ 是第二个,$0\rightarrow r$ ,称为0系对 $r$ 系的方向余弦矩阵。
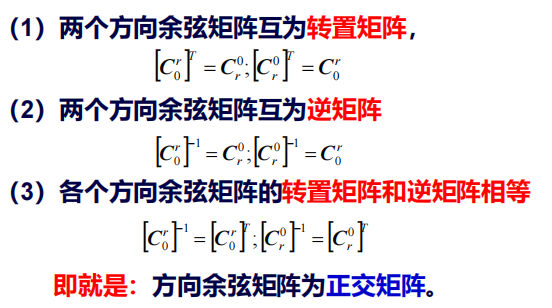
两个方向余弦矩阵的性质
欧拉角法
定义
刚体坐标系相对参考坐标系的角位置,可以使用三次独立的三个转角来确定,这就是欧拉角法原理
欧拉角的选取并不是唯一的
- 第一次转动可以是刚体坐标系的任意一根轴
- 第二次转动是其余两根 二选一
- 第三次转动是在除了第二次转动的那一根外二选一即可
欧拉角法和方向余弦法之间的联系
假设第一次绕着 $x_0$ 轴转 $\alpha$ 角,第二次绕 $y_0$ 转 $\beta$ 角,第三次绕 $z_0$ 转 $\gamma$ 角。
将各个坐标系分别记为 0 系、a 系、b系和 r系。
\[C_{0}^{a}=\left[ \begin{matrix} 1& 0& 0\\ 0& \cos \alpha& \sin \alpha\\ 0& -\sin \alpha& \cos \alpha\\ \end{matrix} \right]\] \[C_{a}^{b}=\left[ \begin{matrix} \cos {\beta }& 0& -\sin {\beta }\\ 0& 1& 0\\ \sin {\beta }& 0& \cos {\beta }\\ \end{matrix} \right]\] \[C_{b}^{r}=\left[ \begin{matrix} \cos \gamma& \sin \gamma& 0\\ -\sin \gamma& \cos \gamma& 0\\ 0& 0& 1\\ \end{matrix} \right]\] \[C_{0}^{r}=C_{b}^{r}C_{a}^{b}C_{0}^{a}=\\ \left[ \begin{matrix} \cos \beta \cos \gamma& \sin \alpha \sin {\beta}\cos \gamma +\cos \alpha \sin \gamma& -\cos \alpha \sin {\beta}\cos \gamma +\sin \alpha \sin \gamma\\ -\cos \beta \sin \gamma& -\sin \alpha \sin {\beta}\sin \gamma +\cos \alpha \cos \gamma& \cos \alpha \sin{\beta}\sin \gamma +\sin \alpha \cos \gamma\\ \sin {\beta}& -\sin \alpha \cos \beta& \cos \alpha \cos \beta\\ \end{matrix} \right]\]- 一组欧拉角可以唯一确定九个方向余弦
- 一组方向余弦也可以唯一确定三个欧拉角
This post is licensed under CC BY 4.0 by the author.